A floor can pass every guideline and still fail the people using it
Most discussions on building comfort focus on temperature, lighting or acoustics. But there is another quieter, more instinctive and rarely articulated expectation that shapes how people feel about a space: floors should not move in a way we can feel.
35 years ago, this expectation was captured perfectly in Griffin’s seminal textbook on human vibration (1990):
“Comfort, or ‘a conscious wellbeing’, within a building merely requires the absence of perceptible vibration for most of the time.”
This deceptively simple statement remains the most accurate description of vibration comfort in buildings to date. And yet it exposes two uncomfortable truths:
First, achieving “no perceptible vibration for most of the time” is in fact a tough performance requirement under everyday conditions. Secondly, it reveals a fundamental mismatch between what engineers calculate or measure and what occupants actually experience. Design practice focuses on how big vibrations are, yet comfort depends on how often they are felt – and we know very little about that.
What we do know is the difference between the two is enormous.
Floors that ‘pass’ on paper often ‘fail’ in practice
This mismatch is not theoretical – it shows up in real buildings repeatedly. After decades of consulting on floors perceived as “too lively” despite being within guidance limits, I have seen the same experience described by others (Wong & Wesolowsky, 2019).
The 2015 Institution of Structural Engineers vibration survey of vibration serviceability confirmed it quantitatively: around a quarter of engineers had encountered vibration complaints in floors that were fully compliant with the guidance of the time. This is a large proportion and did not happen by chance.
In other words, many floors that ‘pass’ on paper still ‘fail’ subjectively in day-to-day usage. The deterministic amplitude-based pass-fail checks simply do not capture the real driver of comfort: the frequency of perceptible events.
The human receiver: crucial but barely understood
Every vibration problem has three elements:
- The source – typically, for example, footsteps in offices
- The path – the floor structure and everything attached to it
- The receiver – the person who senses the vibration
We can analyse, model and measure the first two, but the third is far more complex. The human receiver is a living, perceptive occupant and not an easily predictable quantity. We simply don’t know how many perceptible vibration events per hour or per day are acceptable. Is it ten? Fifty? One every minute? Once a day?
This lack of understanding of ‘perception frequency’ explains why calculated, measured and reported levels often diverge from real comfort. Engineers predict levels; occupants experience events. The two are not interchangeable.
The misconception: people react to frequency, not magnitude
When vibration concerns arise, the common assumption is that vibration levels must be too high relative to a limit. Often, they are not. Many floors that generate complaints operate within guideline limits – sometimes well within them (Wong and Wesolowsky 2019). A floor that produces a strong perceptible movement once a week rarely causes discomfort. A floor that produces barely perceptible movements many times a day will quickly become a source of irritation, complaint and loss of confidence.
Humans respond to frequent disturbance, not to RMS acceleration. We remember when a vibration occurred, not its peak value. Meanwhile, industry guidelines remain level-based largely because amplitude is measurable and calculable. But, to stress this point again, papers now document floors exhibiting vibration levels well below limits while still generating occupant complaints (Wong & Wesolowsky, 2019).
There is a false sense of security in relying on a single vibration level that is convenient to calculate but represents only amplitude. In vibration serviceability, what is easy to calculate is often not what matters. And in this case, it clearly is not.
Why standards fall short
The uncomfortable truth is that our current design tools ignore the very thing that matters most. Indeed, the central international standard for human exposure to building vibration, ISO 2631, openly acknowledges this limitation. In its 2003 edition, it stated:
“Guidance values above which adverse comments due to building vibration could occur are not included… their possible range is too widespread to be reproduced in an International Standard.”
Two decades later, nothing fundamental has changed.
The standard admits it cannot meaningfully predict when people will complain. The science of human perception is too variable, the influencing factors too complex and the research base too thin.
The result is that a set of old amplitude-based limits from the 1980s, that were never designed to deal with the stochastic nature of the human response, govern the calculated comfort and not the real one. This is the root of the persistent gap between formal compliance and actual comfort.
The real issue: floors are excited by random processes
One of the biggest barriers to predicting the number of perceptible events occurring is the inherently random nature of human walking. Footsteps on a real floor are not neat, sinusoidal or perfectly timed loads. People are not machines – they generate messy, variable, narrow-band random walking forces. They walk with different pacing frequencies, step forces, speeds and patterns. They walk alone, in pairs or in streams. They meander, speed up, slow down, stop, cluster, disperse. All the while, their bodies interact with the floor structure, generating not only a walking force that excites the floor dynamically but also dampens it at the same time.
In open-plan workplaces, hundreds of people may walk across a floor each day, creating complex, loosely correlated patterns. The resulting excitation is both complex and unpredictable, yet many widely used design methods still assume a single pedestrian, walking at a fixed frequency, in perfect resonance with the floor. This is a convenient mathematical fiction that captures almost nothing of how real floors are actually loaded dynamically.
Footbridge design moved beyond single-pedestrian deterministic thinking years ago, using probabilistic models for walking frequency and group effects. Floor vibration design has been slower to adapt, despite floors experiencing more complex and less predictable traffic.
As long as the inherently random nature of human walking is treated as a simple deterministic process, our predictions will continue to diverge from reality and floors that pass on paper will still fail in practice. In civil structural engineering, that is not an acceptable outcome. Indeed, it is this divergence that the IStructE survey exposed.
The big missing question: how often is too often?
Perhaps the most surprising fact in the entire field is that we don’t know how many perceptible vibration events people find acceptable; there is no quality research defining this threshold – no tables, no charts, no recommended ranges. All are absent from any guidance, meaning engineers design floors without any reference to the key parameters that govern comfort. The reason for this is simple: it’s not easy to measure and quantify it. There are too many scenarios of daily utilisation to consider. People on floors engage in too many different activities that excite them dynamically, which is difficult to predict mathematically. If we don’t know what the input is, we can’t predict the output. Even if we could, the fundamental problem still remains: how often can low-level vibrations occur before comfort is compromised?
A practical way forward
With facts like these, it’s unsurprising the current situation appears bleak:
- There is a fundamentally flawed calculation method that oversimplifies a complex floor vibration phenomenon.
- A quarter of engineers report serious problems with the method resulting in unsatisfactory as-built performance in floors that appear satisfactory on paper – an unacceptable situation for any structural engineer.
- There is a complete lack of fundamental data on ‘perception frequency’ needed to deal with the issue effectively.
How do we resolve all this?
Since the research base and design tools are not yet able to predict how often perceptible vibrations are too often, the most pragmatic solution today is to reduce the probability that perceptible vibration ever occurs, whatever the cause.
This is precisely what the CALMFLOOR® active mass damper (AMD) is designed to do.
CALMFLOOR doesn’t attempt to model pedestrian behaviour or predict resonant response. It simply responds to whatever typically (near-) resonant, instantaneous vertical floor vibration the device’s in-built accelerometer senses. Its proprietary control algorithm then minimises this vibration in real time using a control force of only a few hundred Newtons, much like noise cancelling headphones.
CALMFLOOR can manage a wide range of vibration frequencies and amplitudes caused by many different dynamic excitations, as long as they are reasonably (near-) resonant with one or more floor modes. This covers most human-induced vibration scenarios in practice. Most importantly, it covers one or more people walking at one or more locations simultaneously – patterns that are impossible to predict at the design stage.
CALMFLOOR reduces all sensed vibration levels, both high and low, shifting perceptible vibrations into the non-perceptible region. The result is a dramatic reduction in the probability of perceptible vibration, which can, in practice, be almost decimated.
Crucially, CALMFLOOR operates independently of the excitation source. One person or several walking, slow or fast, footsteps aligning with the natural frequency or not – none of this matters. It doesn’t rely on assumptions about pacing frequencies, occupancy or footfall patterns. It only responds to how the as-built structure behaves and neutralises vibration the moment it begins to matter.
This makes CALMFLOOR a powerful risk-management tool that effectively manages the risk of unpredicted or unpredictable frequently occurring perceptible floor vibration by decimating its occurrence. This decimation is illustrated in Figure 1 using data from a CALMFLOOR installation on a real office floor.
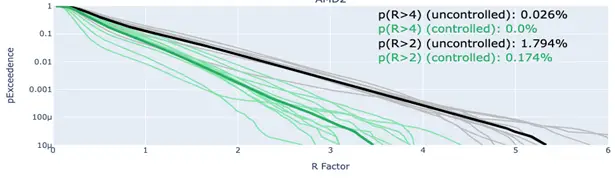
Figure 1: Measured real-life probability of exceedance of R factor on a ‘problem’ floor frequently trafficked by one or more office users. Each grey line shows R-factor probabilities of exceedance during a single day ‘not controlled’ by CALMFLOOR. The thick black line shows average R factor exceedance probability during all ‘not controlled’ days while the green lines are pertinent to the days controlled by CALMFLOOR. Individual controlled days are shown as light green lines whereas the thick green line is the average probability of exceedance of R factors during all controlled days.
On the vertical axis, Figure 1 presents in logarithmic scale the probability of exceedance (pExceedance) of the floor vibration response factor R shown on the horizontal axis. Vibrations with R less than 2 are generally not felt and those above 2 are felt (Griffin 1990). R factors were calculated every 1s from continuously measured vertical accelerations.
When the floor was not controlled by CALMFLOOR, the average probability of R > 2 was 1.794%, or about 65 one-second perceptible vibration events per hour. Office floor users perceived this as problematic. For nominally identical usage days when CALMFLOOR was active, this probability fell to only 0.174%, or about 7 events per hour. Subjectively, this was judged far better and, most importantly, as ‘problem solved’.
CALMFLOOR restored exactly the condition described by Griffin (1990) – the absence of perceptible vibration for most of the time – on a lively office floor whose exact utilisation was not known but whose comfort issue was resolved.
In conclusion
For decades, vibration serviceability design has centred on vibration levels because levels are easy to calculate. However, comfort depends not on magnitude – large or small – but on how often vibrations are perceptible. This shift alone explains why so many floors that pass guideline limits still fail in practice.
ISO 2631 (2003) admits it cannot propose acceptable pass-fail levels of vibration designed to predict when people will complain. Deterministic models cannot capture random human behaviour and the key scientific question – how many perceptible events per day are acceptable – remains unanswered.
Until these gaps are closed, the most reliable path to comfort is not to predict perception frequency, but to suppress it as much as possible.
CALMFLOOR does exactly that – aligning floor performance with human expectations and bridging the longstanding divide between calculations and reality of what constitutes comfort.
CALMFLOOR is, in essence, the perfect risk-management tool for the modern built environment – protecting floors from perceptible vibrations even when the causes are unpredictable. And that is very much the case for modern floor vibrations causes.
References
Griffin, M. J. (1990). Handbook of Human Vibration. London: Academic Press.
ISO (2003). ISO 2631-2:2003 — Mechanical vibration and shock — Evaluation of human exposure to whole-body vibration — Part 2: Vibration in buildings (1 Hz to 80 Hz). International Organization for Standardization, Geneva.
Wong, M. W. Y. & Wesolowsky, M. J. (2019). Why Is My Coffee Cup Rattling: A Reassessment of the Office Vibration Criterion. In S. Pakzad (Ed.), Dynamics of Civil Structures, Volume 2: Proceedings of the 37th IMAC, A Conference and Exposition on Structural Dynamics 2019 (pp. 195-200). Cham: Springer. DOI:10.1007/978-3-030-12115-0